全国服务热线
0769-85333197全国服务热线
0769-853331972022-10-06 15:52:23 责任编辑: 富宝科技 0

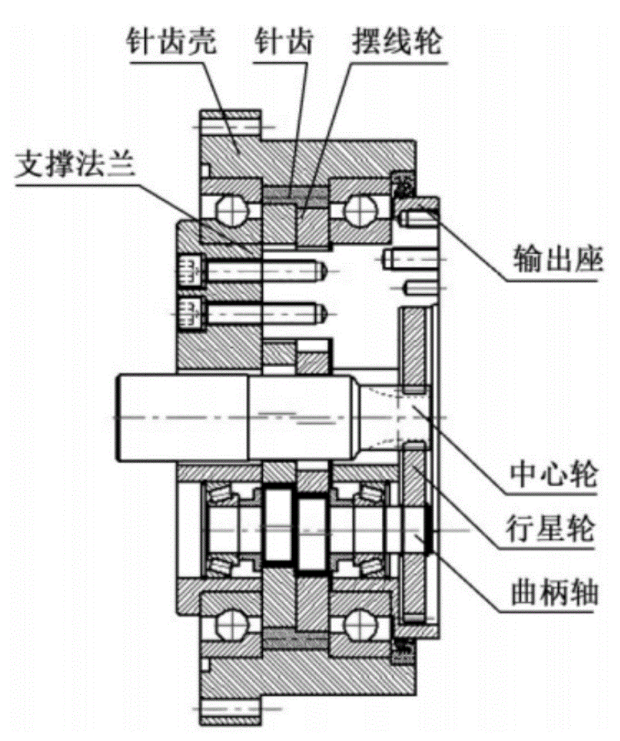
RV减速器是由行星齿轮传动和行星摆线针轮传动组成的两级减速传动机构,具有传动比大、体积小、刚度大、承载能力大、传动精度和传动效率高等优点,广泛应用于工业机器人关节驱动装置中。主轴承作为RV减速器的关键支撑部件,其性能与寿命直接影响减速器的工作性能、可靠性和安全性。日系RV减速器所用主轴承均由nsk轴承和ntn轴承等公司提供,其相关技术保密,具体参数及工艺不得而知。而国内rv减速器零部件的研究主要集中在摆线轮和曲柄轴,关于主轴承的相关研究较少。虽然我国轴承研究已经取得骄人进展,但因可占用空间有限且工作时减速器内部作用力难以确定,使主轴承的优化设计、精度及寿命的相关研究进展缓慢。
RV减速器拥有多种传递转矩的方式,最常用的传动方式是将针齿壳固定,输入轴作为输入端,输出法兰作为输出端。此时对应传动比的计算方法为:
其中,i表示传动比;z1表示太阳轮齿数;z2表示渐开线轮齿数;zb表示针齿齿数。
机器人用RV减速器主轴承受力分析计算方法包括以下过程:
步骤1,对RV减速器进行内部受力分析;
步骤101,获得摆线轮与针轮的接触作用力,具体过程为:通过以下公式确定摆线轮与针轮的初始啮合侧隙:式中,k1′表示短幅系数;表示啮合相位角;△rrp表示等距修形量;△rp表示移距修形量;
通过以下公式确定摆线轮在其啮合点公法线方向上的位移量:
δi=liβi(3)式中,βi为摆线轮弹性变形转角;li表示第i个针齿啮合点的法线至摆线轮中心的距离,可由摆线轮修形后的短幅系数k1′求得,具体公式为:式中,rc′=a(zp-1);a表示偏心距;zp表示针轮齿数;
运用赫兹接触公式,得到各针齿接触变形与啮合作用力的函数关系式wi=f(fi),用数值曲线拟合法使fi=ciwipi逼近wi=f(fi),按照最小二乘法取偏差平方和最小,即:式中,n表示离散值数;由以及推导出ci、pi的表达式,得到每个啮合齿的受力fi大小;
步骤102,获得摆线轮与曲柄轴的接触作用力;
根据求得的摆线轮上各接触齿的作用力fi,由平行四边形法则,计算切向力ft与fr,得到合力fd以及夹角αc:
针齿作用在摆线轮的合力f(矢量)还可用矢量分力f1、f2表示:
其中,单片摆线轮上的三个曲柄轴的作用力为:步骤103,获得曲柄轴与法兰盘的接触作用力,具体过程为:
根据行星轮所受的切向和径向作用力fgt与fgr,便可通过力与力矩平衡方程算得法兰盘支撑轴承的受力大小:fgr=fgttanα(15)式中,r2′表示行星轮节圆半径;α表示渐开线齿轮压力角。
目标函数:
约束条件:0式中,bm表示材料和加工质量的额定系数;fc、f0表示与轴承零件相关系数,通过的算值取得;i表示滚动体列数;z表示滚动体个数;dw表示球直径;α0表示轴承的公称接触角。
在突破外国高科学技术,成功了受力计算技术领域,提供一种机器人用RV减速器主轴承受力分析计算方法:步骤1,对RV减速器进行内部受力分析;步骤101,获得摆线轮与针轮的接触作用力;步骤102,获得摆线轮与曲柄轴的接触作用力;步骤103,获得曲柄轴与法兰盘的接触作用力;步骤2,对RV减速器进行外部受力分析;步骤3,RV减速器主轴承优化设计。能够提高主轴承受力分析额合理性和分析效率。







技术微信