全国服务热线
0769-85333197全国服务热线
0769-853331972022-08-23 11:35:16 责任编辑: 富宝科技 0
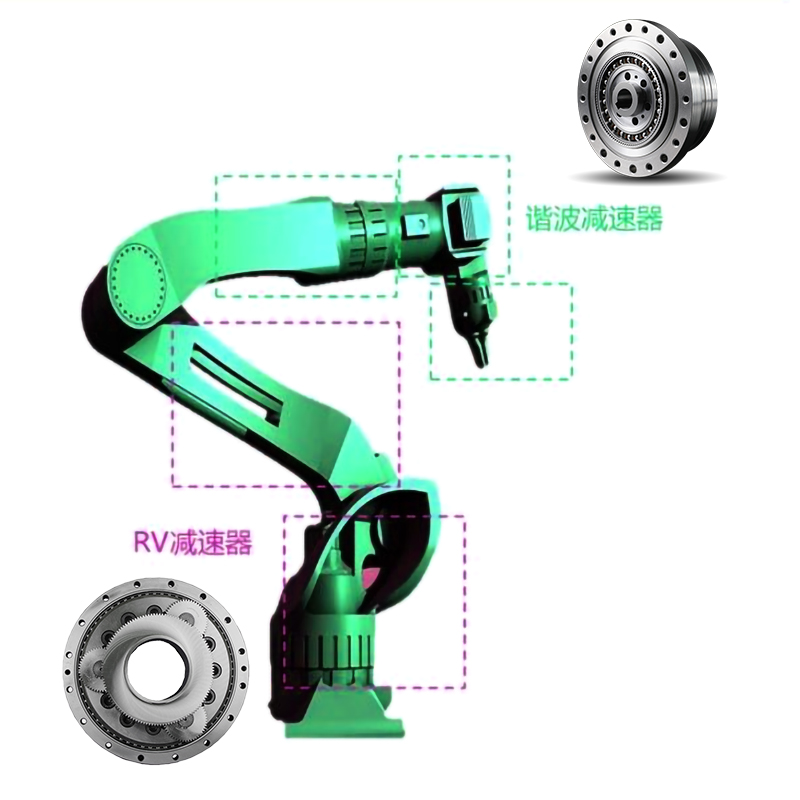
机器人关节采用行星式减速机,其结构原理如下:
电机驱动主动轮a1旋转,a1传动给输入轮a2,其减速比i1=z2/z1(z1为a1轮齿数,z2为a2轮齿数);
a2传递给中心轮a3,a3旋转带动行星轮c1、c2、c3自转,同时b轮为固定轮,则c1、c2、c3在旋转的同时,绕a3公转;
行星轮c1、c2、c3自转、公转传递给输出轮e,其e轮相对于a3轮减速比i2=(1+zb/za)*ze/(ze-zb)(za为中心轮a3齿数,zb为固定轮b齿数,ze为输出轮e齿数);
以申请人开发系列关节之一举例,z1=22,z2=66,za=18,zb=60,zc=22,ze=63,模数m=0.5其转动比:
i1=66/22=3;i2=(1+z60/18)*63/(63-60)=91,i总=i1*i2=3*91=273。
由此可见,该结构的行星式减速机结构经凑,而且能够得到很大的传动比,用很小的直流电机就可以得到很大的输出扭矩。







技术微信