全国服务热线
0769-85333197全国服务热线
0769-853331972020-07-09 08:20:00 0
工业机器人作为经典的机电一体化数字设备,应用领域广泛。单个完整的工业机器人系统的成本中减速器占 35%左右,可以看出影响工业机器人发展的主要因素是减速器。虽然机器人的应用已经在国内得到快速发展,但目前工业机器人的主要供应商仍来自日本和欧洲。所以对其中的核心部件减速器的国产化是降低成本和打破国外垄断的首要任务。
1、RV 减速器原理
RV(Rotate Vector)减速器是在摆线针轮的基础上开发的 2 级封闭式低齿差行星传动机构,是CNC 机床、工业用机器人关节等机电学领域所是用的新型行星传动机构。由于其拥有运动精度高,传动比大,扭转刚度大,传动效率高等优点,许多学者和研究机构将其作为研究的重点。
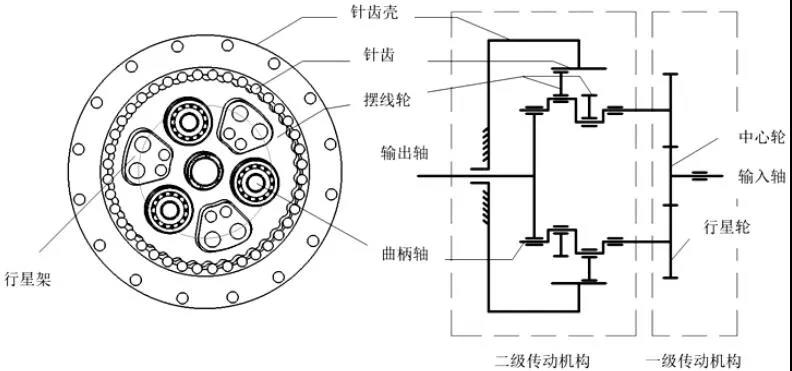
图1 是 RV 减速器传动的简图,第一级渐开线圆柱齿轮行星传动机构和第二级摆线针轮行星齿轮减速机构组成,输入轴和太阳轮形成 RV 减速器的输入部。摆线针齿轮的输入由行星齿轮和曲柄轴共同完成。当机构开始传动时,若太阳轮进行顺时针旋转,行星齿轮进入公转与逆时针旋转共存的状态,此时,摆线轮由曲柄轴驱动以进行偏心运动。这种情况下,摆线轮将受到啮合针轮的碰撞,其轴线以轮轴为中心公转,向相反方向自转。此时,其将通过曲柄轴推动行星架输出机构顺时针旋转。
2、二级摆线针轮轮传动机构误差研究现状
RV 减速器传动精度的主要指标是回差和传动误差,主要影响因素有:一级渐开线圆柱齿轮行星传动机构误差、二级摆线针轮传动机构误差、输出机构误差。
由于二级摆线针轮传动机构的误差不需要通过一系列的传动传递到输出机构,而与之相反的是,RV减速器一级减速机构的误差需要,即除以系统的总传动比。因此,渐开线齿轮在一级齿轮传动中的相关误差对 RV 减速器的传动精度影响不大,而摆线针轮行星机构的传动精度加权系数大,对传动误差影响大。当设计并生产 RV 减速器时,应认真考虑二级摆线针轮传动机构中的误差因素。改变二级摆线针轮传动机构误差的主要因素有摆线齿廓的修形、曲柄轴偏心距误差、曲柄轴轴承游隙等。







技术微信